Image Processing or more specifically, Digital Image Processing is a process by which a digital image is processed using a set of algorithms. It involves a simple level task like noise removal to common tasks like identifying objects, person, text etc., to more complicated tasks like image classifications, emotion detection, anomaly detection, segmentation etc.
With the growth of Artificial Intelligence algorithms and its ecosystem, Digital Image Processing using Neural Networks has become popular in recent times. It has a wide variety of application areas like security, banks, military, agriculture, law enforcement, manufacturing, medical etc.
In this article, we shall try to address one subset of image processing – image segmentation.
What is the Process of Image Segmentation?
A digital image is made up of various components that need to be “analysed”, let’s use that word for simplicity sake and the “analysis” performed on such components can reveal a lot of hidden information from them. This information can help us address a plethora of business problems – which is one of the many end goals that are linked with image processing.
Image Segmentation is the process by which a digital image is partitioned into various subgroups (of pixels) called Image Objects, which can reduce the complexity of the image, and thus analysing the image becomes simpler.
We use various image segmentation algorithms to split and group a certain set of pixels together from the image. By doing so, we are actually assigning labels to pixels and the pixels with the same label fall under a category where they have some or the other thing common in them.
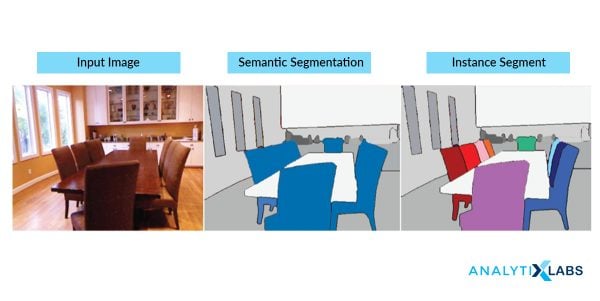
Using these labels, we can specify boundaries, draw lines, and separate the most required objects in an image from the rest of the not-so-important ones. In the below example, from a main image on the left, we try to get the major components, e.g. chair, table etc. and hence all the chairs are colored uniformly. In the next tab, we have detected instances, which talk about individual objects, and hence the all the chairs have different colors.
This is how different methods of segmentation of images work in varying degrees of complexity and yield different levels of outputs.
From a machine learning point of view, later, these identified labels can be further used for both supervised and unsupervised training and hence simplifying and solving a wide variety of business problems. This is a simpler overview of segmentation in Image Processing. Let’s try to understand the use cases, methodologies, and algorithms used in this article.
Need for Image Segmentation & Value Proposition
The concept of partitioning, dividing, fetching, and then labeling and later using that information to train various ML models have indeed addressed numerous business problems. In this section, let’s try to understand what problems are solved by Image Segmentation.
A facial recognition system implements image segmentation, identifying an employee and enabling them to mark their attendance automatically. Segmentation in Image Processing is being used in the medical industry for efficient and faster diagnosis, detecting diseases, tumors, and cell and tissue patterns from various medical imagery generated from radiography, MRI, endoscopy, thermography, ultrasonography, etc.
Satellite images are processed to identify various patterns, objects, geographical contours, soil information etc., which can be later used for agriculture, mining, geo-sensing, etc. Image segmentation has a massive application area in robotics, like RPA, self-driving cars, etc. Security images can be processed to detect harmful objects, threats, people and incidents. Image segmentation implementations in python, Matlab and other languages are extensively employed for the process.
A very interesting case I stumbled upon was a show about a certain food processing factory on the Television, where tomatoes on a fast-moving conveyer belt were being inspected by a computer. It was taking high-speed images from a suitably placed camera and it was passing instructions to a suction robot which was pick up rotten ones, unripe ones, basically, damaged tomatoes and allowing the good ones to pass on.
This is a basic, but a pivotal and significant application of Image Classification, where the algorithm was able to capture only the required components from an image, and those pixels were later being classified as the good, the bad, and the ugly by the system. A rather simple looking system was making a colossal impact on that business – eradicating human effort, human error and increasing efficiency.
Image Segmentation is very widely implemented in Python, along with other classical languages like Matlab, C/C++ etc. More likey so, Image segmentation in python has been the most sought after skill in the data science stack.
Types of Image Segmentation
1. The Approach
Whenever one tries to take a bird’s eye view of the Image Segmentation tasks, one gets to observe a crucial process that happens here – object identification. Any simple to complex application areas, everything is based out of object detection.
And as we discussed earlier, detection is made possible because the image segmentation algorithms try to – if we put it in lay man’s terms – collect similar pixels together and separate out dissimilar pixels. This is done by following two approaches based on the image properties:
1.1. Similarity Detection (Region Approach)
This fundamental approach relies on detecting similar pixels in an image – based on a threshold, region growing, region spreading, and region merging. Machine learning algorithms like clustering relies on this approach of similarity detection on an unknown set of features, so does classification, which detects similarity based on a pre-defined (known) set of features.
1.2. Discontinuity Detection (Boundary Approach)
This is a stark opposite of similarity detection approach where the algorithm rather searches for discontinuity. Image Segmentation Algorithms like Edge Detection, Point Detection, Line Detection follows this approach – where edges get detected based on various metrics of discontinuity like intensity etc.

2. The Types of Techniques
Based on the two approaches, there are various forms of techniques that are applied in the design of the Image Segmentation Algorithms. These techniques are employed based on the type of image that needs to be processed and analysed and they can be classified into three broader categories as below:
2.1 Structural Segmentation Techniques
These sets of algorithms require us to firstly, know the structural information about the image under the scanner. This can include the pixels, pixel density, distributions, histograms, color distribution etc. Second, we need to have the structural information about the region that we are about to fetch from the image – this section deals with identifying our target area, which is highly specific to the business problem that we are trying to solve. Similarity based approach will be followed in these sets of algorithms.
2.2 Stochastic Segmentation Techniques
In these group of algorithms, the primary information that is required for them is to know the discrete pixel values of the full image, rather than pointing out the structure of the required portion of the image. This proves to be advantageous in the case of a larger group of images, where a high degree of uncertainty exists in terms of the required object within an object. ANN and Machine Learning based algorithms that use k-means etc. make use of this approach.
2.3 Hybrid Techniques
As the name suggests, these algorithms for image segmentation make use of a combination of structural method and stochastic methods i.e., use both the structural information of a region as well as the discrete pixel information of the image.
Image segmentation Techniques
Based on the image segmentation approaches and the type of processing that is needed to be incorporated to attain a goal, we have the following techniques for image segmentation.
- Threshold Method
- Edge Based Segmentation
- Region Based Segmentation
- Clustering Based Segmentation
- Watershed Based Method
- Artificial Neural Network Based Segmentation
| Techniques | Description | Advantages | Disadvantages |
| Thresholding Method | Focuses on finding peak values based on the histogram of the image to find similar pixels | Doesn’t require complicated pre-processing, simple | Many details can get omitted, threshold errors are common |
| Edge Based Method | based on discontinuity detection unlike similarity detection |
Good for images having better contrast between objects. | Not suitable for noisy images |
| Region-Based Method | based on partitioning an image into homogeneous regions | Works really well for images with a considerate amount of noise, can take user markers for fasted evaluation | Time and memory consuming |
| Traditional Segmentation Algorithms | Divides image into k number of homogenous, mutually exclusive clusters – hence obtaining objects | Proven methods, reinforced with fuzzy logic and more useful for real-time application. | Determining cost function for minimization can be difficult. |
| Watershed Method | based on topological interpretation of image boundaries | segments obtained are more stable, detected boundaries are distinct | Gradient calculation for ridges is complex. |
| Neural Networks | based on deep learning algorithms – Convolutional Neural Networks | easy implementation, no need for following any complicated algorithms, ready-made libraries available in Python, more practical applications | Training the model for custom and business images is time consuming and resource costly. |
1. Threshold Method
This is perhaps the most basic and yet powerful technique to identify the required objects in an image. Based on the intensity, the pixels in an image get divided by comparing the pixel’s intensity with a threshold value. The threshold method proves to be advantageous when the objects in the image in question are assumed to be having more intensity than the background (and unwanted components) of the image.
At its simpler level, the threshold value T is considered to be a constant. But that approach may be futile considering the amount of noise (unwanted information) that the image contains. So, we can either keep it constant or change it dynamically based on the image properties and thus obtain better results. Based on that, thresholding is of the following types:
1.1 Simple Thresholding
This technique replaces the pixels in an image with either black or white. If the intensity of a pixel (Ii,j) at position (i,j) is less than the threshold (T), then we replace that with black and if it is more, then we replace that pixel with white. This is a binary approach to thresholding.
1.2 Otsu’s Binarization
In global thresholding, we had used an arbitrary value for threshold value and it remains a constant. The major question here is, how can we define and determine the correctness of the selected threshold? A simpler but rather inept method is to trial and see the error.
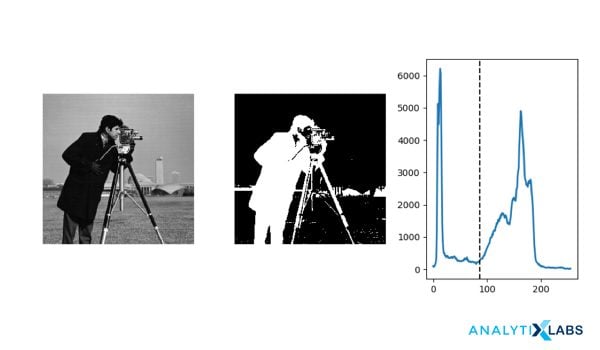
But, on the contrary, let us take an image whose histogram has two peaks (bimodal image), one for the background and one for the foreground. According to Otsu binarization, for that image, we can approximately take a value in the middle of those peaks as the threshold value. So in simply put, it automatically calculates a threshold value from image histogram for a bimodal image.
The disadvantage here, however, is for images that are not bimodal, the image histogram has multiple peaks, or one of the classes (peaks) present has high variance.
However, Otsu’s Binarization is widely used in document scans, removing unwanted colors from a document, pattern recognition etc.
1.3 Adaptive Thresholding
A global value as threshold value may not be good in all the conditions where an image has different background and foreground lighting conditions in different actionable areas. We need an adaptive approach that can change the threshold for various components of the image. In this, the algorithm divides the image into various smaller portions and calculates the threshold for those portions of the image.
Hence, we obtain different thresholds for different regions of the same image. This in turn gives us better results for images with varying illumination. The algorithm can automatically calculate the threshold value. The threshold value can be the mean of neighborhood area or it can be the weighted sum of neighborhood values where weights are a Gaussian window (a window function to define regions).
2. Edge Based Segmentation
Edge detection is the process of locating edges in an image which is a very important step towards understanding image features. It is believed that edges consist of meaningful features and contains significant information. It significantly reduces the size of the image that will be processed and filters out information that may be regarded as less relevant, preserving and focusing solely on the important structural properties of an image for a business problem.
Edge-based segmentation algorithms work to detect edges in an image, based on various discontinuities in grey level, colour, texture, brightness, saturation, contrast etc. To further enhance the results, supplementary processing steps must follow to concatenate all the edges into edge chains that correspond better with borders in the image.

Edge detection algorithms fall primarily into two categories – Gradient based methods and Gray Histograms. Basic edge detection operators like sobel operator, canny, Robert’s variable etc are used in these algorithms. These operators aid in detecting the edge discontinuities and hence mark the edge boundaries. The end goal is to reach at least a partial segmentation using this process, where we group all the local edges into a new binary image where only edge chains that match the required existing objects or image parts are present.
3. Region Based Segmentation
The region based segmentation methods involve the algorithm creating segments by dividing the image into various components having similar characteristics. These components, simply put, are nothing but a set of pixels. Region-based image segmentation techniques initially search for some seed points – either smaller parts or considerably bigger chunks in the input image.
Next, certain approaches are employed, either to add more pixels to the seed points or further diminish or shrink the seed point to smaller segments and merge with other smaller seed points. Hence, there are two basic techniques based on this method.
3.1 Region Growing
It’s a bottom to up method where we begin with a smaller set of pixel and start accumulating or iteratively merging it based on certain pre-determined similarity constraints. Region growth algorithm starts with choosing an arbitrary seed pixel in the image and compare it with its neighboring pixels.
If there is a match or similarity in neighboring pixels, then they are added to the initial seed pixel, thus increasing the size of the region. When we reach the saturation and hereby, the growth of that region cannot proceed further, the algorithm now chooses another seed pixel, which necessarily does not belong to any region(s) that currently exists and start the process again.
Region growing methods often achieve effective Segmentation that corresponds well to the observed edges. But sometimes, when the algorithm lets a region grow completely before trying other seeds, that usually biases the segmentation in favour of the regions which are segmented first. To counter this effect, most of the algorithms begin with the user inputs of similarities first, no single region is allowed to dominate and grow completely and multiple regions are allowed to grow simultaneously.
Region growth, also a pixel based algorithm like thresholding but the major difference is thresholding extracts a large region based out of similar pixels, from anywhere in the image whereas region-growth extracts only the adjacent pixels. Region growing techniques are preferable for noisy images, where it is highly difficult to detect the edges.
3.2 Region Splitting and Merging
The splitting and merging based segmentation methods use two basic techniques done together in conjunction – region splitting and region merging – for segmenting an image. Splitting involves iteratively dividing an image into regions having similar characteristics and merging employs combining the adjacent regions that are somewhat similar to each other.
A region split, unlike the region growth, considers the entire input image as the area of business interest. Then, it would try matching a known set of parameters or pre-defined similarity constraints and picks up all the pixel areas matching the criteria. This is a divide and conquers method as opposed to the region growth algorithm.
Now, the above process is just one half of the process, after performing the split process, we will have many similarly marked regions scattered all across the image pixels, meaning, the final segmentation will contain scattered clusters of neighbouring regions that have identical or similar properties. To complete the process, we need to perform merging, which after each split which compares adjacent regions, and if required, based on similarity degrees, it merges them. Such algorithms are called split-merge algorithms.
4. Clustering Based Segmentation Methods
Clustering algorithms are unsupervised algorithms, unlike Classification algorithms, where the user has no pre-defined set of features, classes, or groups. Clustering algorithms help in fetching the underlying, hidden information from the data like, structures, clusters, and groupings that are usually unknown from a heuristic point of view.
The clustering based techniques segment the image into clusters or disjoint groups of pixels with similar characteristics. By the virtue of basic Data Clustering properties, the data elements get split into clusters such that elements in same cluster are more similar to each other as compared to other clusters. Some of the more efficient clustering algorithms such as k-means, improved k means, fuzzy c-mean (FCM) and improved fuzzy c mean algorithm (IFCM) are being widely used in the clustering based approaches proposed.
K means clustering is a chosen and popular method because of its simplicity and computational efficiency. The Improved K-means algorithm can minimize the number of iterations usually involved in a k-means algorithm. FCM algorithm allows data points, (pixels in our case) to belong to multiple classes with varying degrees of membership. The slower processing time of an FCM is overcome by improved FCM.
A massive value add of clustering based ML algorithms is that we can measure the quality of the segments that get generated by using several statistical parameters such as: Silhouette Coefficient, rand index (RI) etc.
4.1 k-means clustering
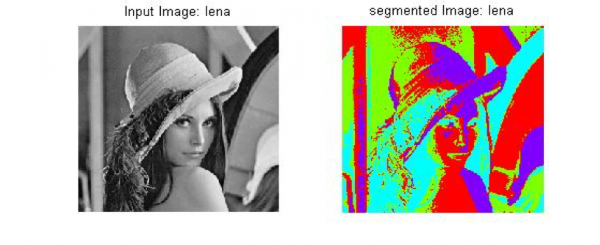
K-means is one of the simplest unsupervised learning algorithms which can address the clustering problems, in general. The process follows a simple and easy way to classify a given image through a certain number of clusters which are fixed apriori. The algorithm actually starts at this point where the image space is divided into k pixels, representing k group centroids. Now, each of the objects is then assigned to the group based on its distance from the cluster. When all the pixels are assigned to all the clusters, the centroids now move and are reassigned. These steps repeat until the centroids can no longer shift.
At the convergence of this algorithm, we have areas within the image, segmented into “K” groups where the constituent pixels show some levels of similarity.
4.2 Fuzzy C Means
k-means, as discussed in the previous section, allows for dividing and grouping together the pixels in an image that have certain degrees of similarity. One of the striking features in k-means is that the groups and their members are completely mutually exclusive. A Fuzzy C Means clustering technique allows the data points, in our case, the pixels to be clustered in more than one cluster. In other words, a group of pixels can belong to more than one cluster or group but they can have varying levels of associativity per group. The FCM algorithm has an optimization function associated with it and the convergence of the algorithm depends on the minimization of this function.
At the convergence of this algorithm, we have areas within the image, segmented into “C” groups where the constituent pixels inside a group show some levels of similarity, and also they will have a certain degree of association with other groups as well.
5. Watershed Based Methods
Watershed is a ridge approach, also a region-based method, which follows the concept of topological interpretation. We consider the analogy of geographic landscape with ridges and valleys for various components of an image. The slope and elevation of the said topography are distinctly quantified by the gray values of the respective pixels – called the gradient magnitude. Based on this 3D representation which is usually followed for Earth landscapes, the watershed transform decomposes an image into regions that are called “catchment basins”. For each local minimum, a catchment basin comprises all pixels whose path of steepest descent of gray values terminates at this minimum.
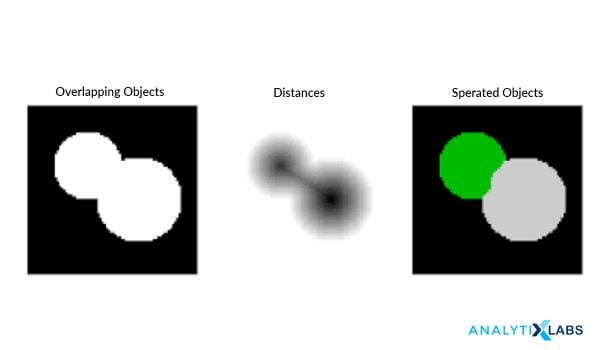
In a simple way of understanding, the algorithm considers the pixels as a “local topography” (elevation), often initializing itself from user-defined markers. Then, the algorithm defines something called “basins” which are the minima points and hence, basins are flooded from the markers until basins meet on watershed lines. The watersheds that are so formed here, they separate basins from each other. Hence the picture gets decomposed because we have pixels assigned to each such region or watershed.
6. Artificial Neural Network Based Segmentation Method
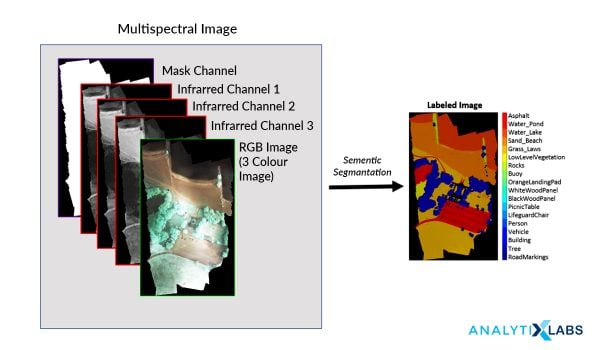
The approach of using Image Segmentation using neural networks is often referred to as Image Recognition. It uses AI to automatically process and identify the components of an image like objects, faces, text, hand-written text etc. Convolutional Neural Networks are specifically used for this process because of their design to identify and process high-definition image data.
An image, based on the approach used, is considered either as a set of vectors (colour annotated polygons) or a raster (a table of pixels with numerical values for colors). The vector or raster is turned into simpler components that represent the constituent physical objects and features in an image. Computer vision systems can logically analyze these constructs, by extracting the most important sections, and then by organizing data through feature extraction algorithms and classification algorithms.
These algorithms are widely used in a variety of industries and applications. E-commerce industry uses it for providing relevant products to users for their search requirements and browsing history. The manufacturing industry uses it for anomaly detection, detecting damaged objects, ensuring worker safety etc. Image Recognition is famously used in education and training for visually impaired, speech impaired students. Although Neural Nets are time consuming when it comes to training the data, the end results have been very promising and the application of these has been highly successful.
Implementation and Pre-requisites
Image processing in general has been implemented in various programming languages – Java, matplotlib, C++ etc. With its fundamental nature of modularity, versatile implementations and uses in data science stack, machine learning and deep learning, Python also has robust libraries to implement different techniques employed in Image Segmentation. Python libraries like scikit-image, OpenCV, Mahotas, Pillow, matplotlib, SimplelTK etc. are famously used to implement image processing in general and image segmentation in particular.
Using python libraries are a simpler way of implementation and it doesn’t demand any complicated requirements prior to implantation – except of course a basic knowledge in Python programming and pandas. To have more control over the black box-like libraries that are used in this process, one needs to have certain basic skills. Probability and Statistics, machine learning is one of the primary requirements for the stack in general and also for segmentation in image processing. Good knowledge of differential equations, linear algebra, and calculus gives reinforced control over the pre-processing steps involved in image segmentation.
Working knowledge of Neural Networks – specifically, the Convolutional Neural Networks is essential for the ANN implementation of image processing and segmentation in image processing and classification methods.
If one wants to have a custom implementation of the image processing and segmentation algorithms in a lower level language like C++ or be it be Python, a basic knowledge of digital signal processing is required – this is majorly required for noise removal, identifying contours, generating histograms – a process that is also pre-implemented in some of the libraries as mentioned above.
Final Thoughts & Summary Table
Image segmentation is a promising set of skills from Deep Learning as it has an important role to play in Medical Imaging and various organizations are striving to build an effective system for proactive diagnosis from medical imagery. One of the distinct and famous applications can be seen in Cancer cell detection systems where Image Segmentation proved pivotal in faster detection of disease tissues and cells from the imagery and hence enabling the Doctors in providing timely treatment. The manufacturing industry now highly relies on image recognition techniques to detect anomalies which usually escape human eyes, hence increasing the efficiency of the products. Image Segmentation implementation using Python is widely sought after skills and much training is available for the same. One needs to have a good hold of both the traditional algorithms for image processing and also the Neural Networks implementations. With Python, the implementation is lucid and can be done with minimum code and effort.
You may also like to read:
What is Knowledge representation in Artificial Intelligence?
Top 60 Artificial Intelligence Interview Questions & Answers